埃隆·馬斯克在得克薩斯超級工廠的最新采訪中,再次將聚光燈投向了特斯拉的Optimus人形機器人,稱其為公司未來發展的核心驅動力之一。他親自演示了這款機器人在日常生活中的多種應用場景,包括打掃房間、操作清潔工具、處理家務細節如撕紙巾、烹飪輔助、開關柜門以及窗簾操控,甚至展示了其強大的物理能力——輕松提起Model X的前連桿并放入手推車。
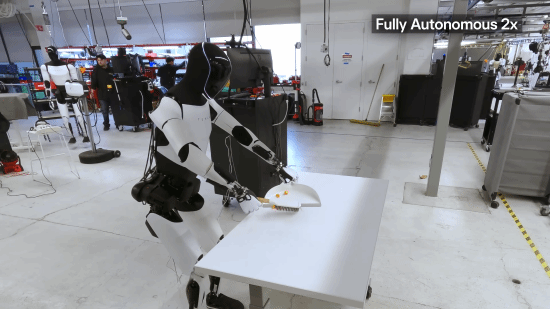
尤為引人注目的是,Optimus所展現的所有這些復雜功能,都是由一個統一的神經網絡所驅動的。特斯拉的研發團隊采用了一種創新的學習方法,即向機器人輸入大量人類執行日常任務的第一視角視頻數據。這種技術使得Optimus能夠直接觀察、學習并模仿人類動作,極大地加速了其新技能的掌握和性能優化。
特斯拉Optimus項目的領航者Milan Kovac,在社交媒體上分享了項目的最新進展和未來規劃。他透露,團隊正積極探索讓機器人從更廣泛的視頻資源中學習人類行為的可能性,不再局限于第一人稱視角的視頻,而是擴展到包括第三人稱視角在內的多種攝像設備拍攝的內容。
Kovac強調:“我們已經在將人類視頻知識轉化為機器人可執行動作方面取得了顯著成果,盡管目前主要集中在第一人稱視頻上。這一突破讓我們能夠更迅速地在新任務中部署機器人,相較于傳統的人工遠程操作,效率有了質的飛躍。”
他還進一步闡述,借助這一創新方法,Optimus正不斷解鎖新的能力。這些能力可以通過簡單的語音或文字指令激活,并由機器人的核心神經網絡統一調度執行。展望未來,Kovac的團隊計劃進一步深化這一技術,將學習范圍擴展到基于第三人稱視角的視頻,利用互聯網上豐富的視頻資源,同時探索在真實或模擬環境中引入自我強化學習機制,以增強機器人的穩定性和環境適應能力。