近日,安徽省在機器人技術領域迎來了一個里程碑式的突破。據合肥發布消息,江淮前沿技術協同創新中心自主研發的繩驅S1機器人,在2025世界機器人大會上驚艷亮相,展現了其獨特的魅力和創新實力。
這款安徽首款繩驅S1機器人,全身共設有46個自由度,搭載了激光雷達、毫米波雷達、深度相機、視觸覺傳感器以及六維力傳感器等一系列尖端傳感設備。這些高精尖的配置,使得S1機器人能夠在多維度場景下實現精準的交互感知,展現出了強大的技術實力。

與傳統的剛性臂機器人不同,S1機器人采用了7個自由度的繩驅臂設計。這一創新性的設計,通過在電機與關節之間增加繩索傳動,巧妙地利用繩索的柔性震動來消減沖擊力,使得末端接觸力呈現出遞減的趨勢。這種設計不僅提高了機器人的安全性,還使得在與人類進行交互時更加溫柔、友好。
江淮中心繩驅S1機器人項目的技術負責人田鎣梅表示:“如果說傳統的剛性臂是機器人的骨骼,那么繩驅臂就是它的經脈。傳統的機械臂通過金屬連桿直接傳動,力的傳遞直接而有力,但往往缺乏柔性。而繩驅臂則通過繩索傳動,實現了力的柔和傳遞,這在人機交互中顯得尤為重要。”
除了繩驅S1機器人外,江淮中心還自研了一款視觸靈巧手,同樣在大會上首次亮相。這款靈巧手擁有20個自由度,其中15個為主動自由度,不僅具備彎曲能力,還能進行一定幅度的側擺運動。其運動靈活性達到了類人水平,能夠輕松抓取氣球、旋擰瓶蓋等。
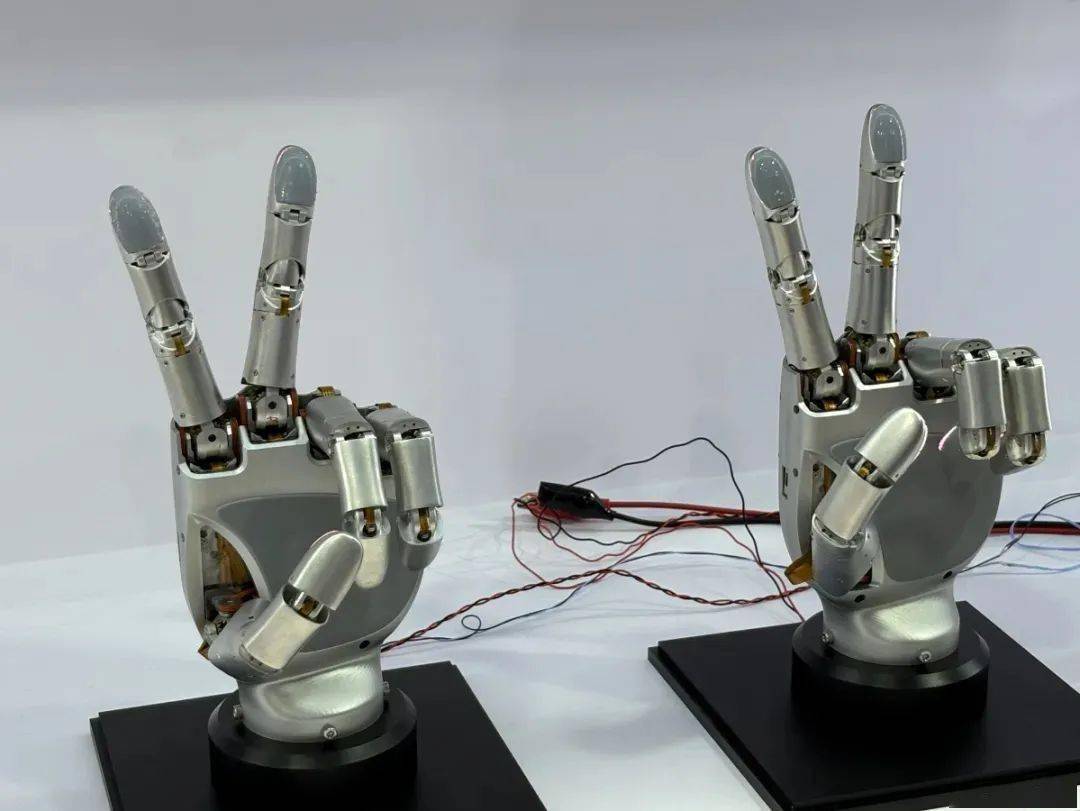
這款靈巧手的指尖設計與人手曲線極為相似,表面覆蓋有一層彈性硅膠層。硅膠層內部集成了高分辨率的微型相機,當靈巧手與物體接觸時,微型相機能夠捕捉到硅膠層的微小變形,從而準確計算出接觸位置和接觸力等信息。通過先進的算法,靈巧手能夠精確把控拿捏物體的力度,即便是抓取豆腐這種易碎物體也能游刃有余。
微型相機還能透過硅膠層捕獲物體表面的材質、紋理、硬度等物理屬性。甚至在與人類手指觸碰時,都能清晰地捕捉到指紋信息。這一創新性的設計,無疑為機器人與人類之間的交互提供了更加精準、安全的可能性。